Es ist geplant, den Motor auch für das Hinterrad zu montieren, um den Anstieg besser zu bewältigen.
Bilder
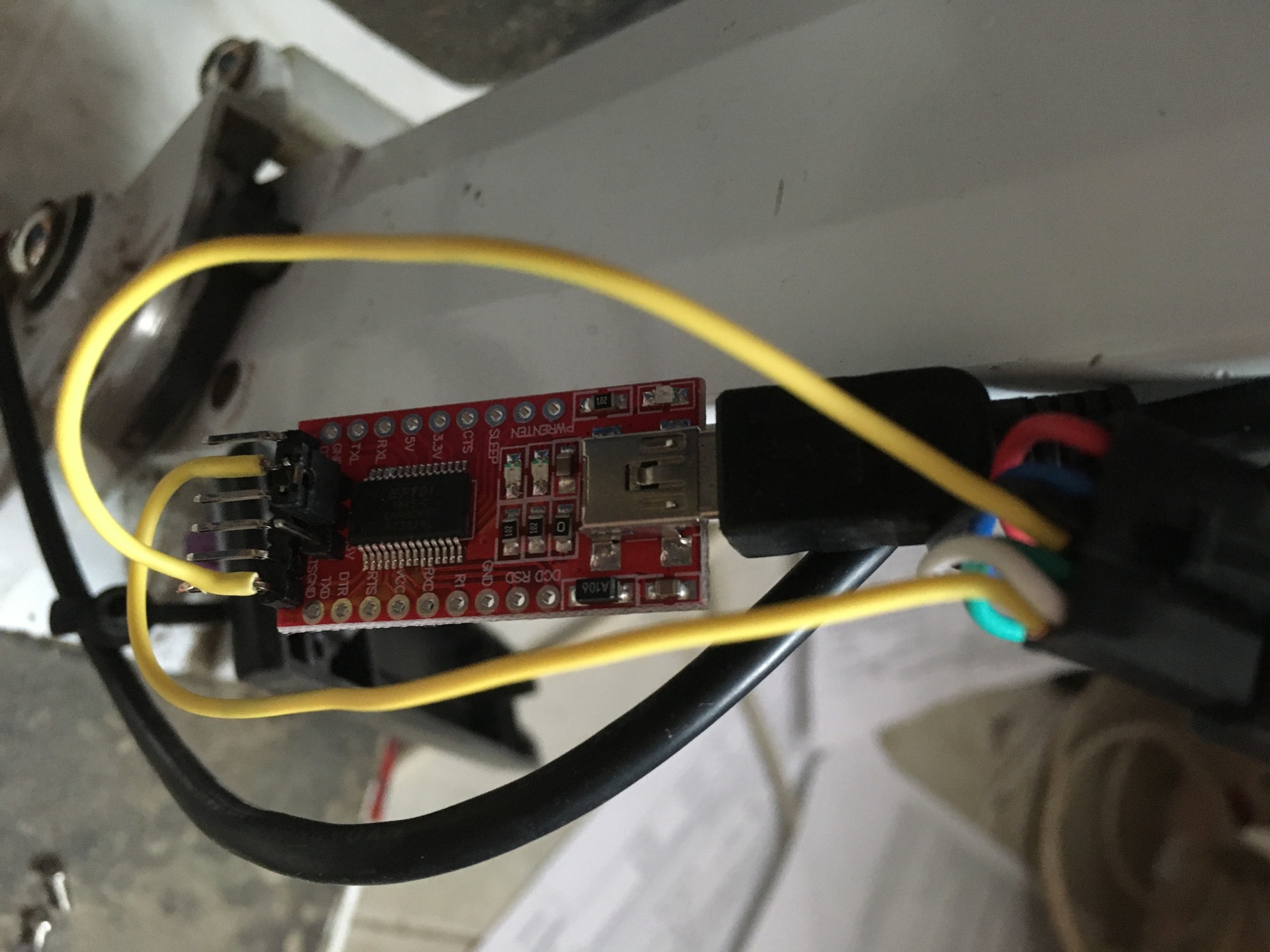
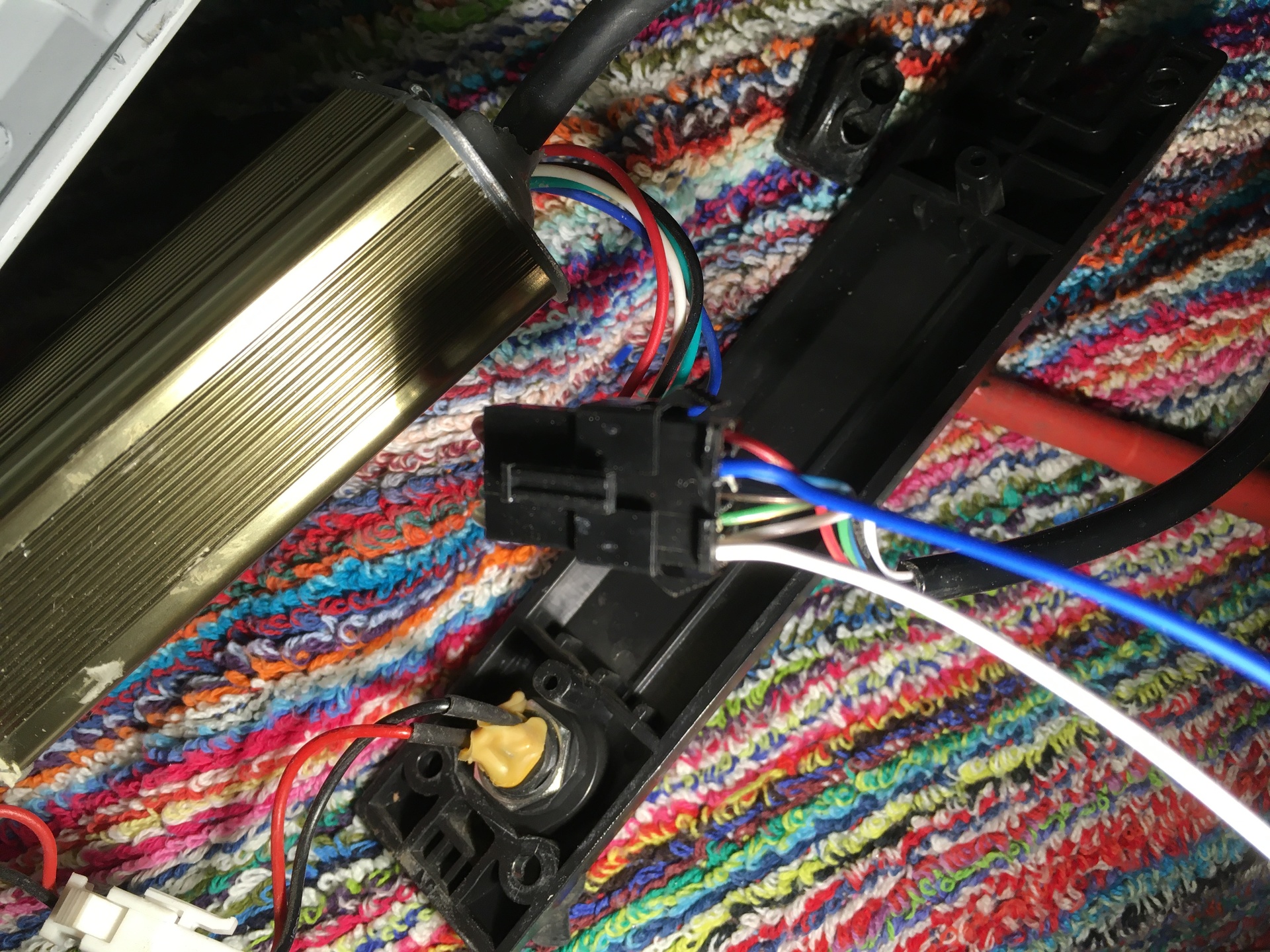
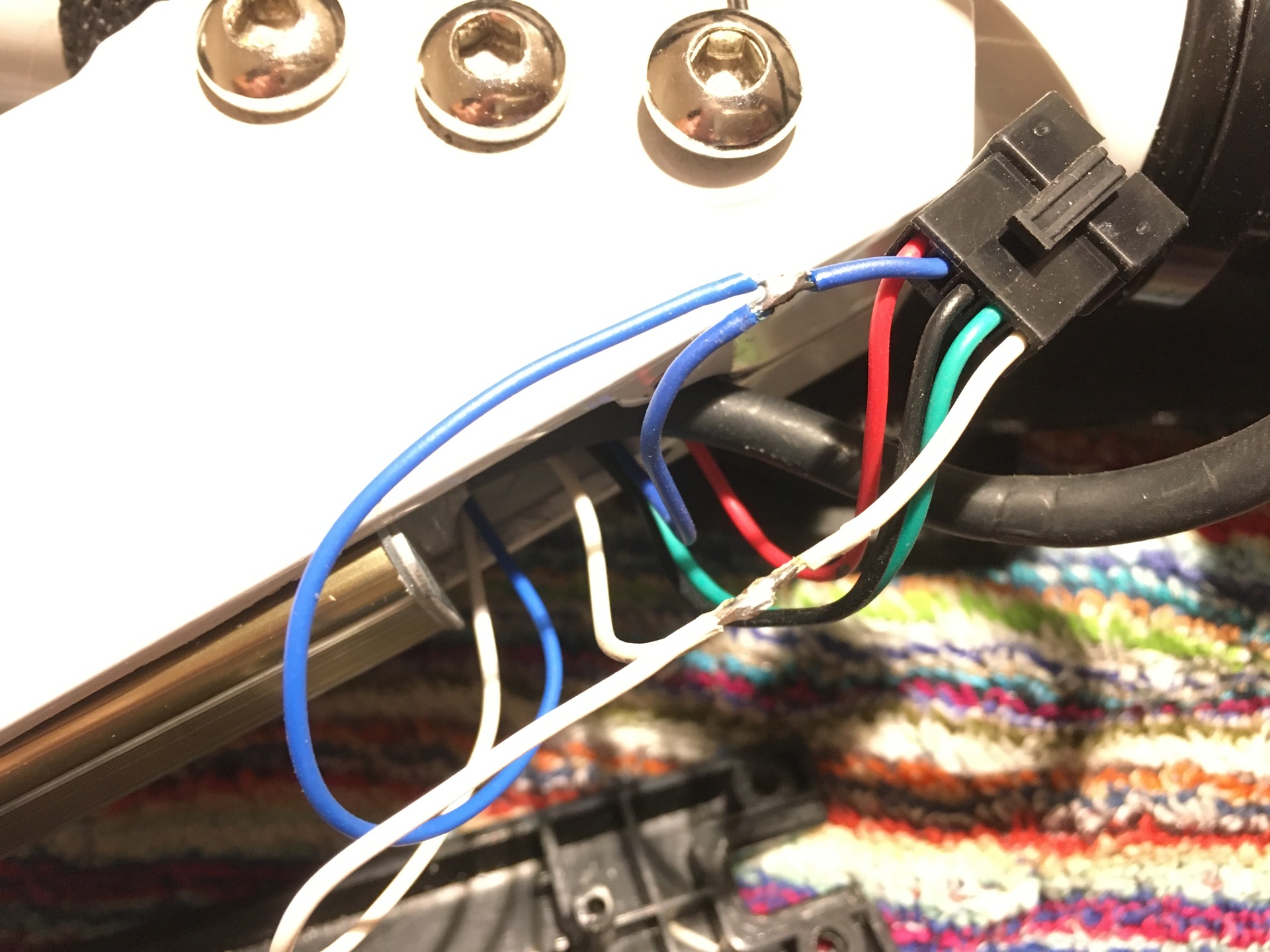
Ich habe ein neues Motorcontroller- und Anzeigemodul bestellt. Wir haben die Schnittstelle zwischen ihnen untersucht.
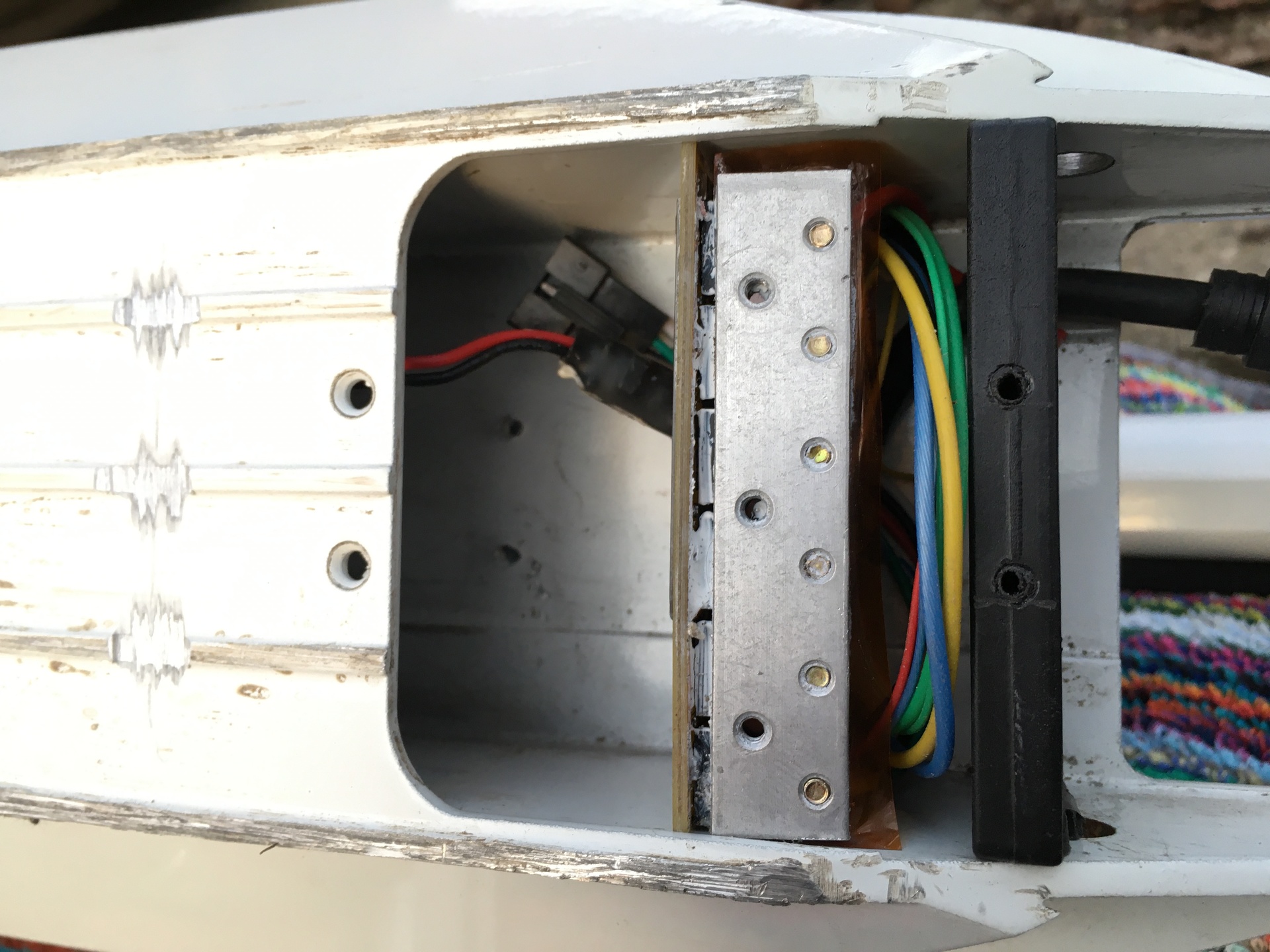
- Schwarz - Grund
- Rot - + 36V Versorgungsspannung
- Blau - + 36V geschaltete Versorgungsspannung
- Grün - Kommunikation vom Controller zum Display
- Weiß - Kommunikation vom Display zur Steuerung

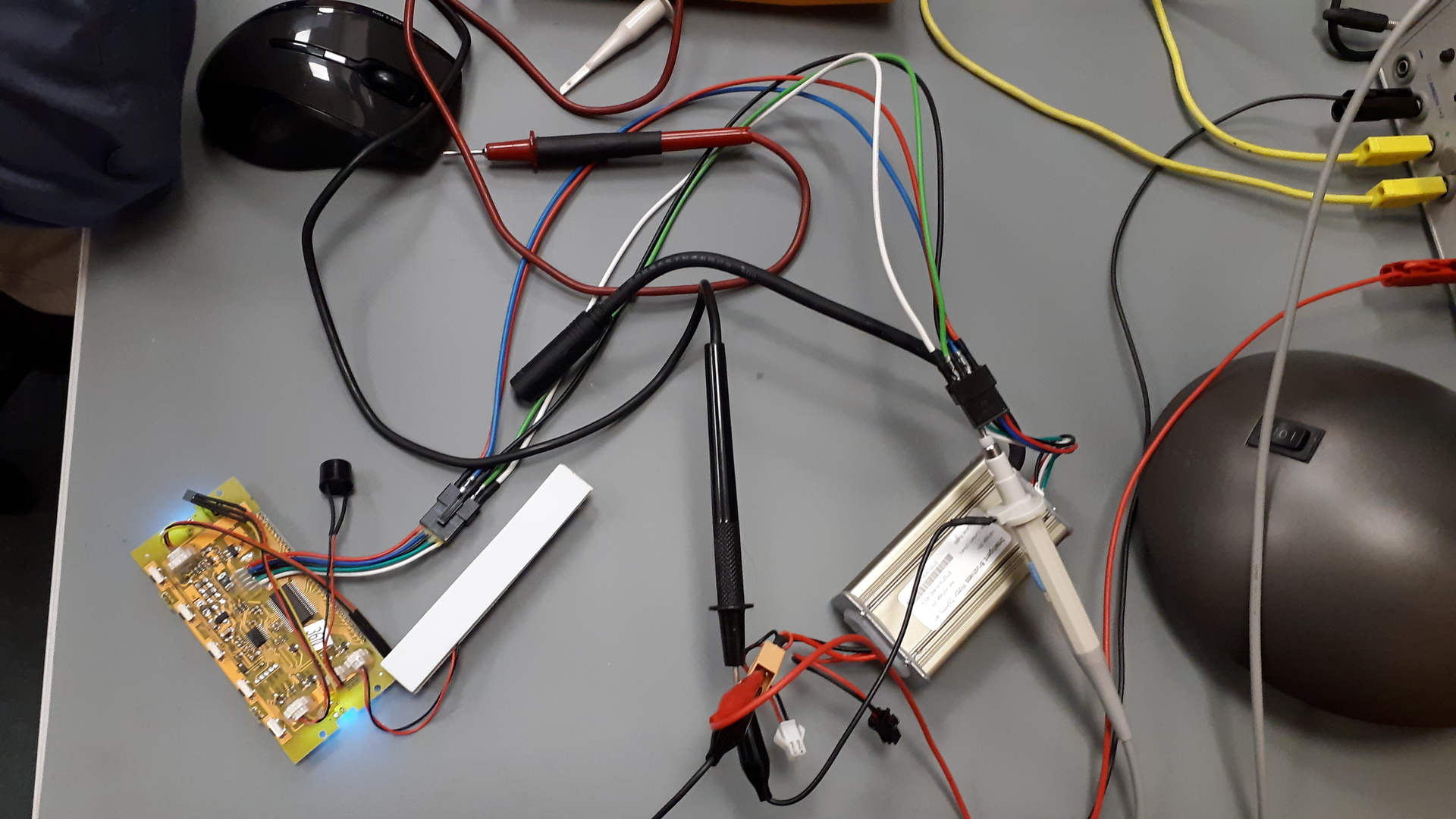
Die Kommunikation erfolgt über UART mit 9600 Baudrate.

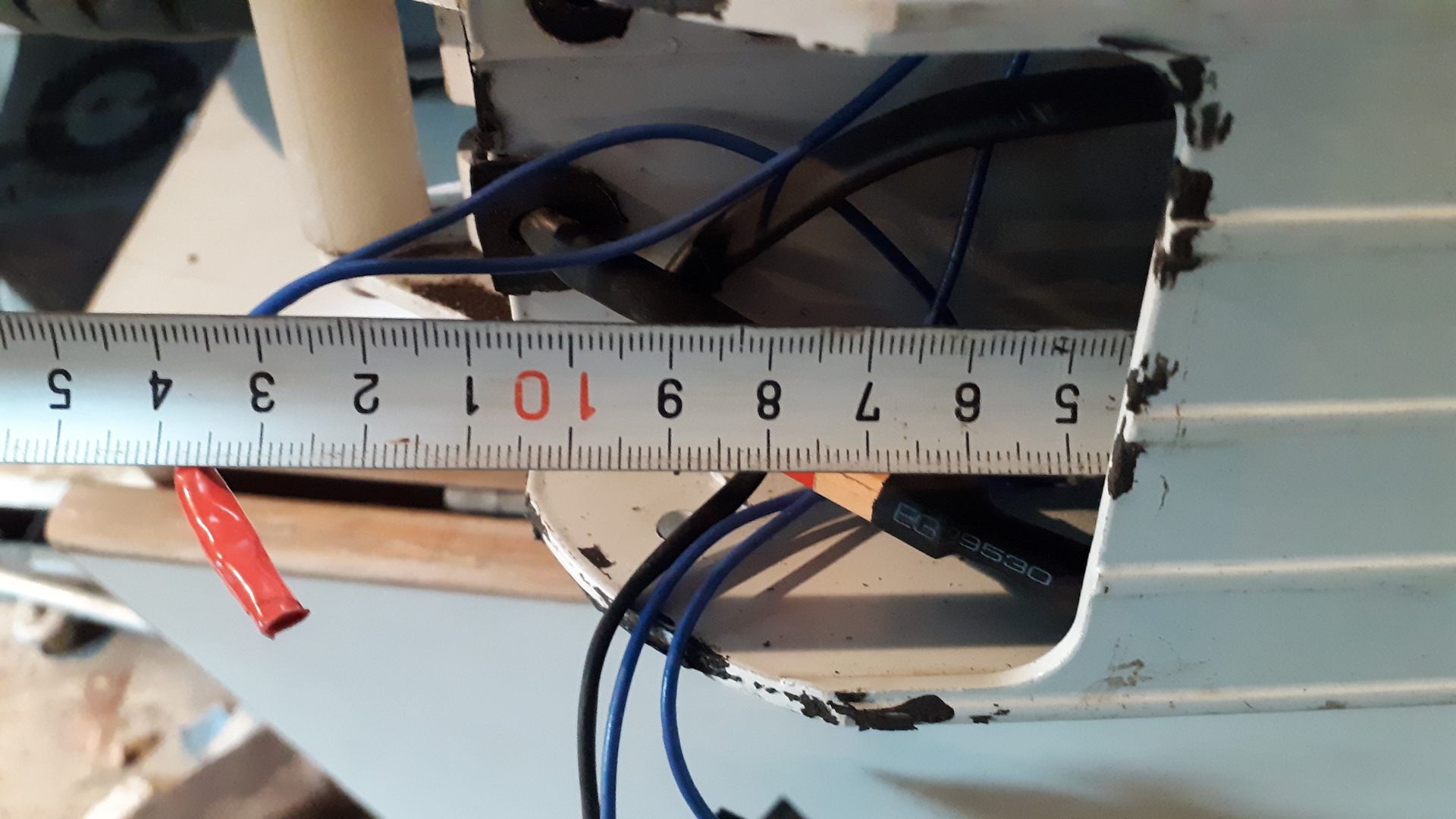
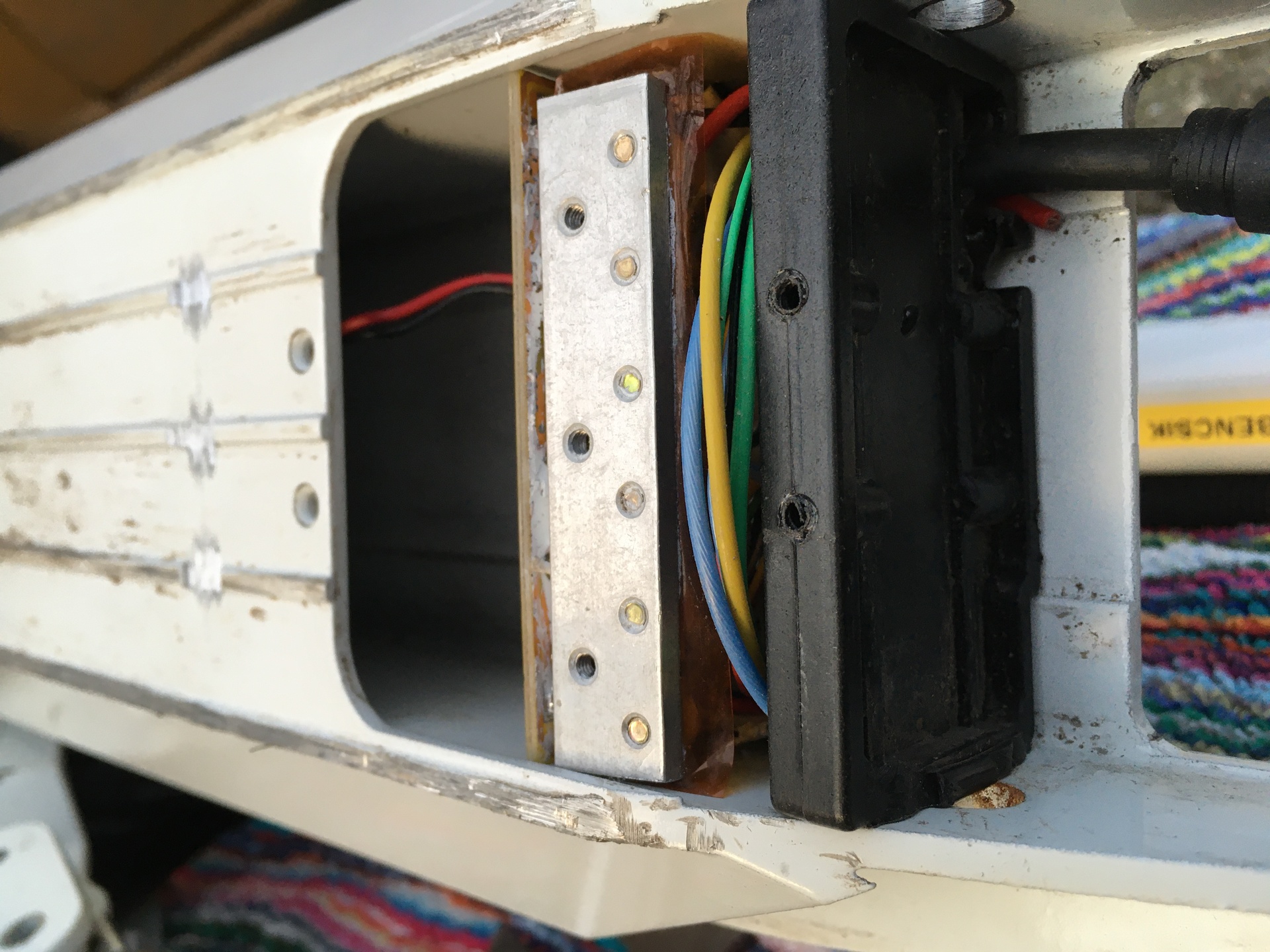
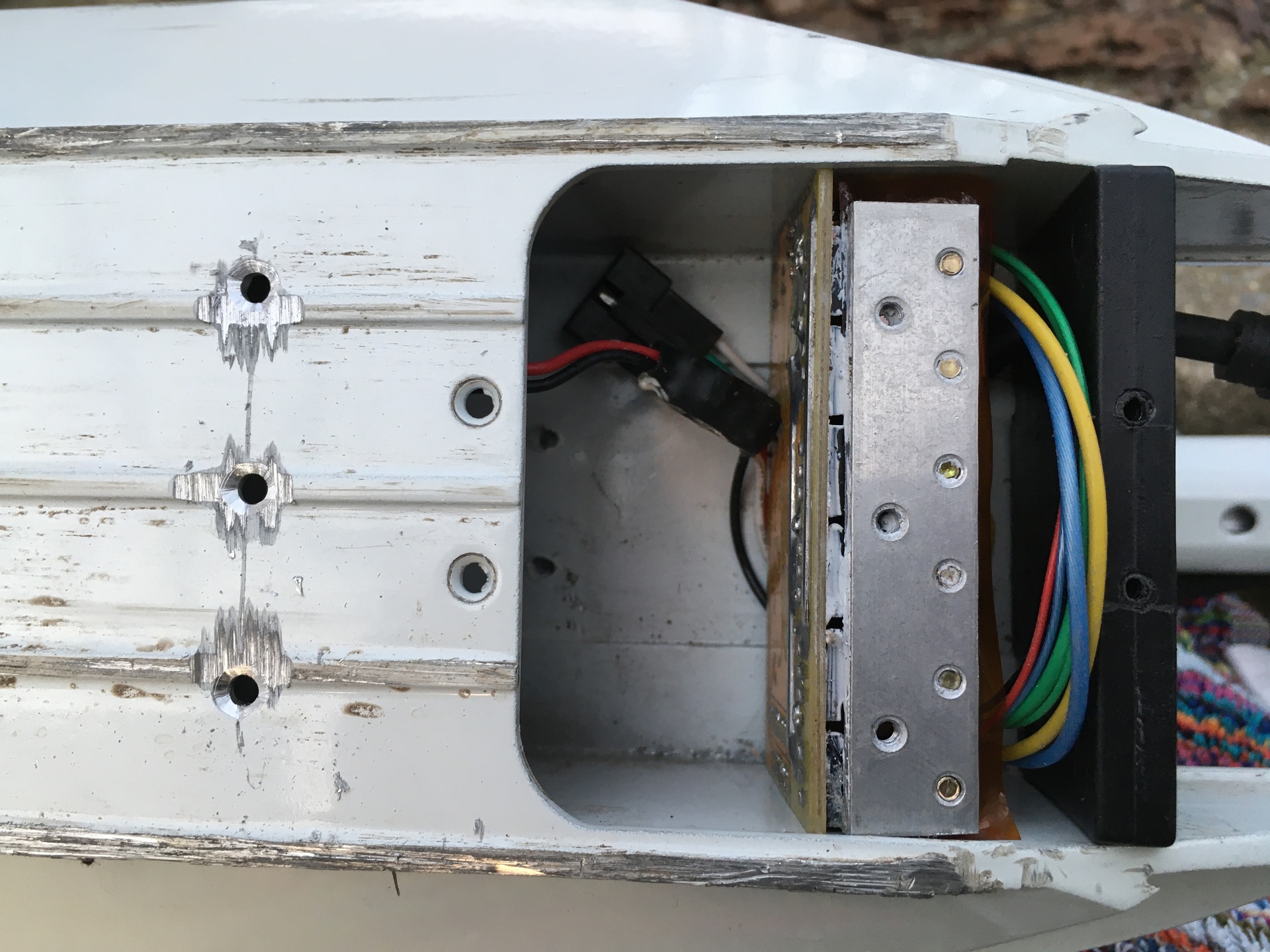
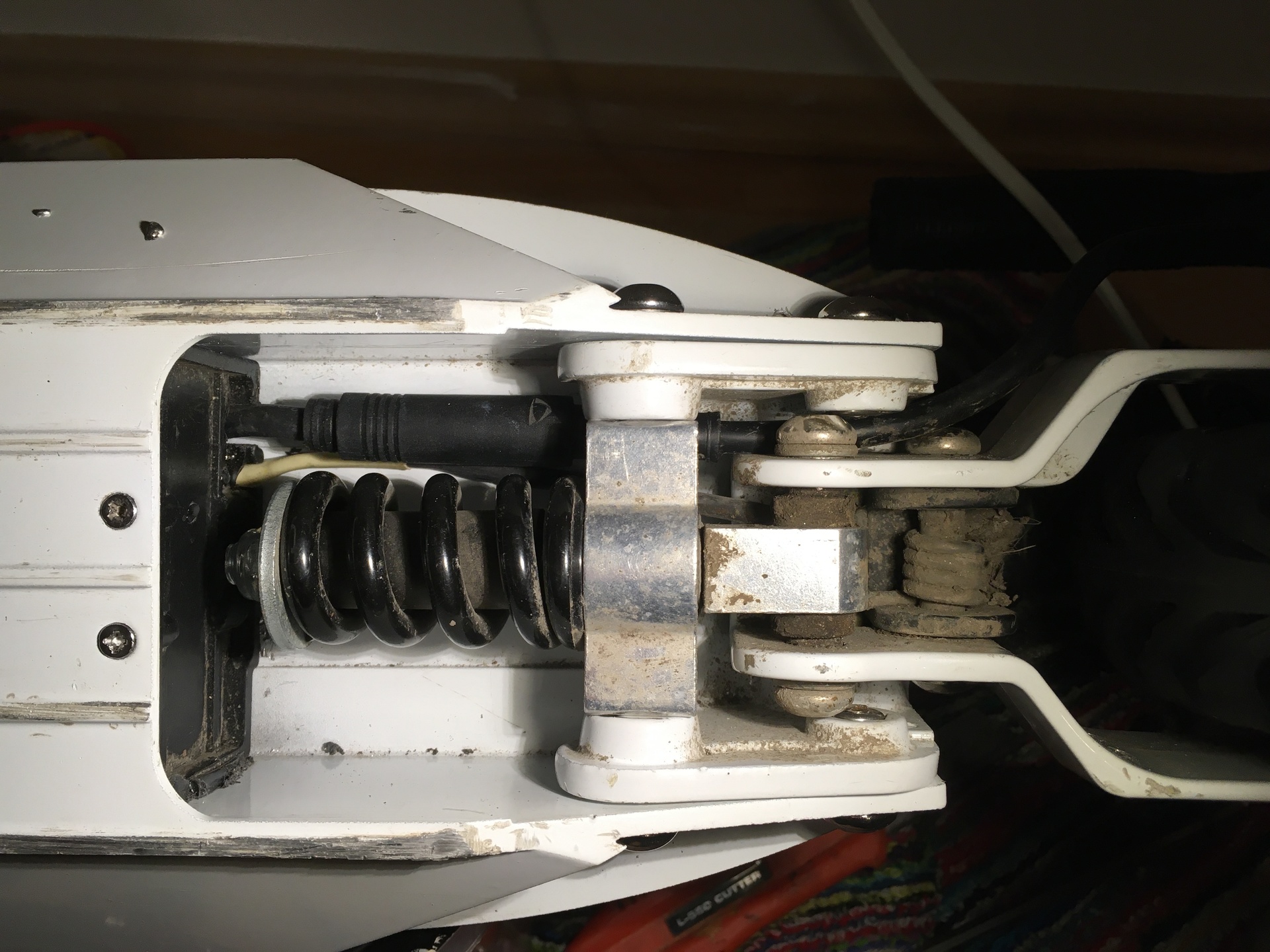
Hinter dem Akku befindet sich anscheinend genügend Platz für die hintere Steuerung.
Der Controller passt fast.
Wenn die Kommunikation zwischen Controller und Display unterbrochen ist,
Die Walze funktioniert weiterhin einwandfrei, nur die Informationen vom Controller fehlen auf dem Display. Z.B. Geschwindigkeit blinkt. Das bedeutet, wenn ich die beiden Steuerungen auf diese Weise an die gleiche Displayschnittstelle anschließe, dass das von der hinteren Steuerung übertragene Kommunikationskabel nicht angeschlossen ist, sollten die beiden Motoren einwandfrei funktionieren. Nur der angezeigte Stromverbrauchswert ist nicht korrekt.
 Ich griff einen halben Millimeter von der Kante der hinteren Motorsteuerkarte entfernt.
Jetzt passt seine Größe zur kleinen Größe.
Ich griff einen halben Millimeter von der Kante der hinteren Motorsteuerkarte entfernt.
Jetzt passt seine Größe zur kleinen Größe.

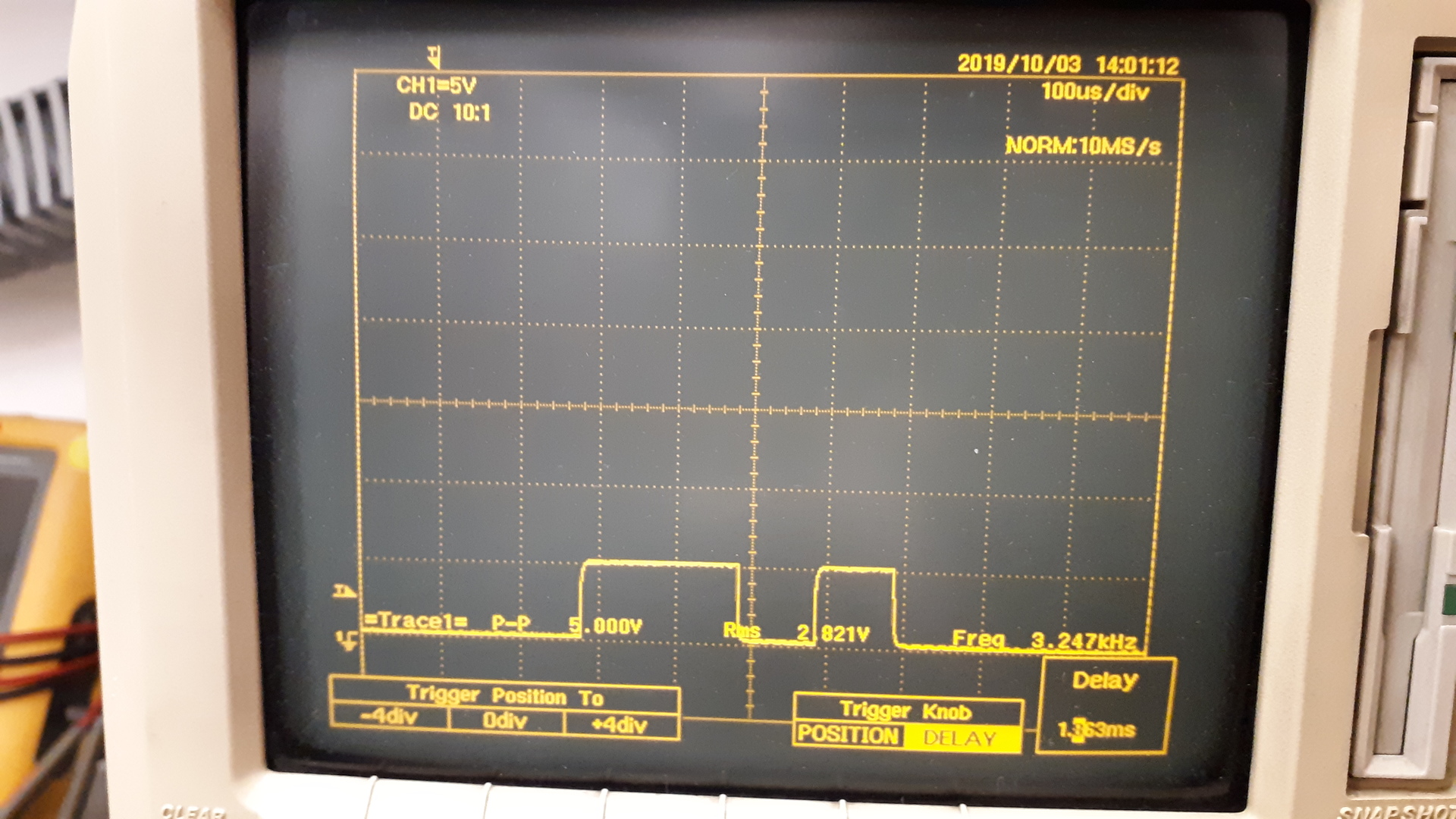
Protokoll
Anzeige -> Controller
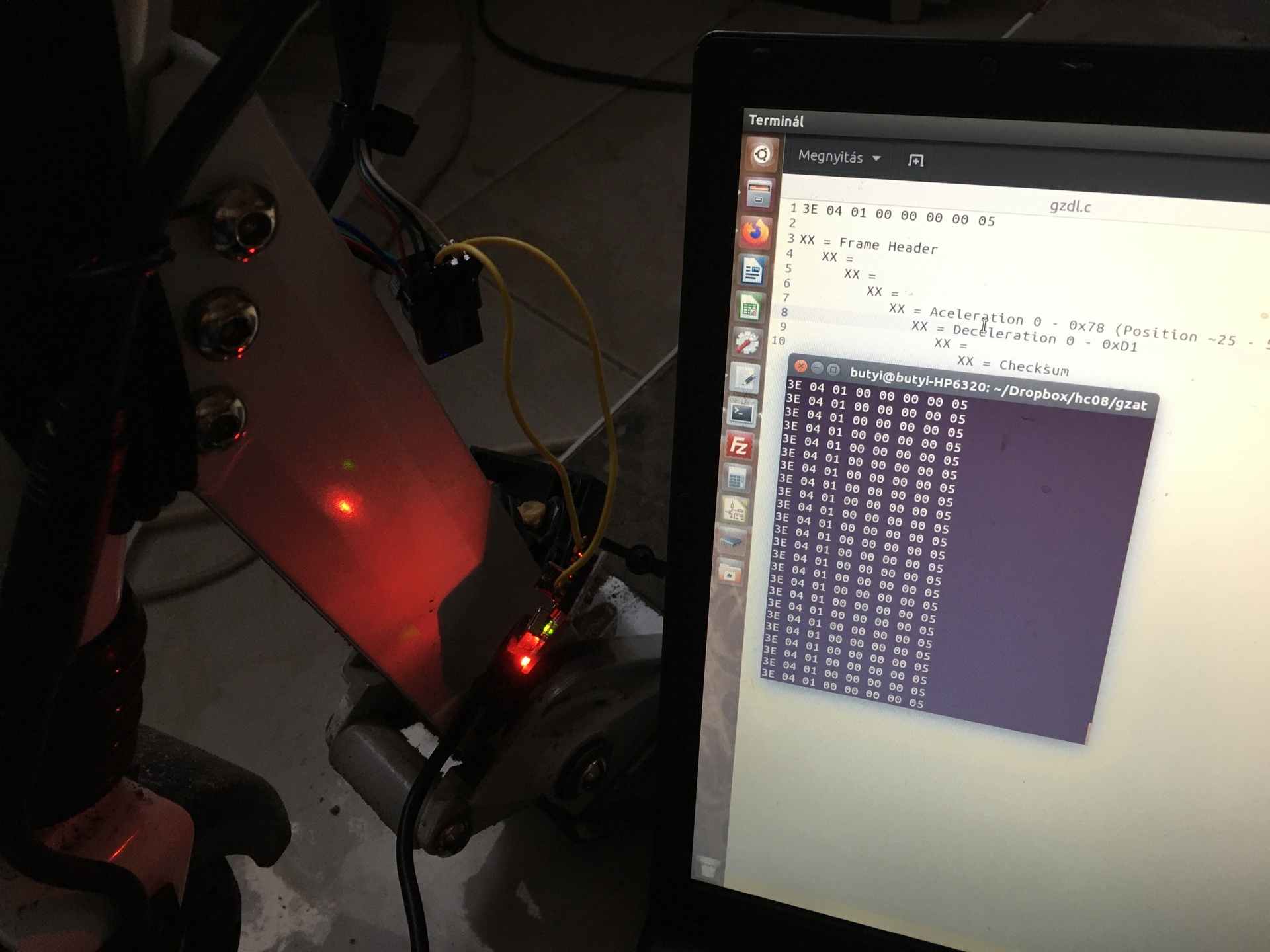
8 Bytes alle 50 ms. Beispiel: 3E 04 01 00 00 00 00 05
Bytes
- 1. Header
- 2. Ich weiß nicht was das ist, es hat sich während meiner Tests nicht geändert.
- 3. Geschwindigkeitsstufe. 1: 0x01, 2: 0x02, 3: 0x03
- 4. Lichter, 0x00: ki, 0x80: be
- 5. Aceleration demand 0x00 - 0x78, allmählich zu erhöhen, aber der aktive Bereich liegt nur zwischen 25% und 50% des Handarms.
- 6. Verzögerungsanforderung 0x00 - 0xD1, 0x0A hat ein Zeitfenster, 0x10 hat ein Zeitfenster. Kann nicht gesteuert werden.
- 7. Ich weiß nicht was das ist, es hat sich während meiner Tests nicht geändert.
- 8. Prüfsumme
Ausschaltbefehl: 0xFF 0x00 0x00 nach einem Frame.
Controller -> Anzeige
11 Bytes, alle 500 ms. Beispiel: 3C 07 01 00 00 0B B8 00 00 00 CBBytes
- 1. Header
- 2-3. Batteriespannung (höchstwahrscheinlich konnte ich sie nicht ändern, um zu überprüfen, ob es wirklich so ist.)
- 4. Kontrollleuchten. 0x01: Motorfehler. 0x04: aktive Bremse.
- 5. Strom [A]
- 6-7. Zeit zwischen den Impulsen des Geschwindigkeitssensors. 0kmh = 0x0BB8, 5kmh = 0x01CC, 10kmh = 0X00D9, 20kmh = 0x0070, 34kmh = 0x0044
- 8. Ich weiß nicht was das ist, es hat sich während meiner Tests nicht geändert.
- 9. Ich weiß nicht was das ist, es hat sich während meiner Tests nicht geändert.
- 10. Ich weiß nicht was das ist, es hat sich während meiner Tests nicht geändert.
- 11. Prüfsumme
Dies ist das PHP-Skript, mit dem ich den Prüfsummenalgorithmus überprüft habe: kugoo_s1_communication_checksum_checker_script.zip
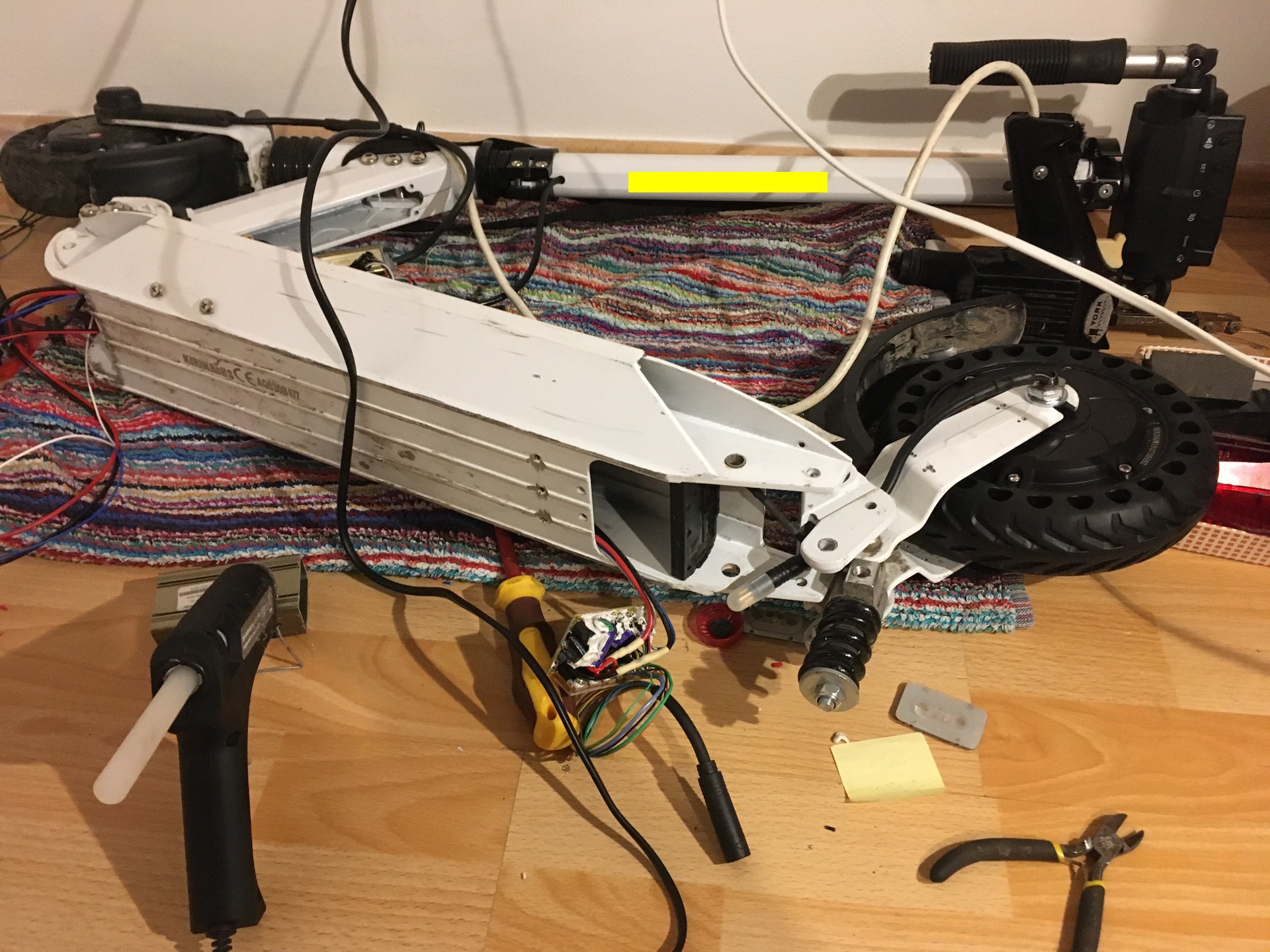
Als Nächstes wird das Motorrad eingebaut.





Als Nächstes wird die hintere Steuerschaltung eingebaut.



Der Workshop.

Die Kommunikation muss verbunden sein. Ich habe auch die geschaltete Stromleitung angeschlossen, möglicherweise wird sie für einen ordnungsgemäßen Ausschaltvorgang benötigt.
Ich habe die anderen Kabel entfernt.

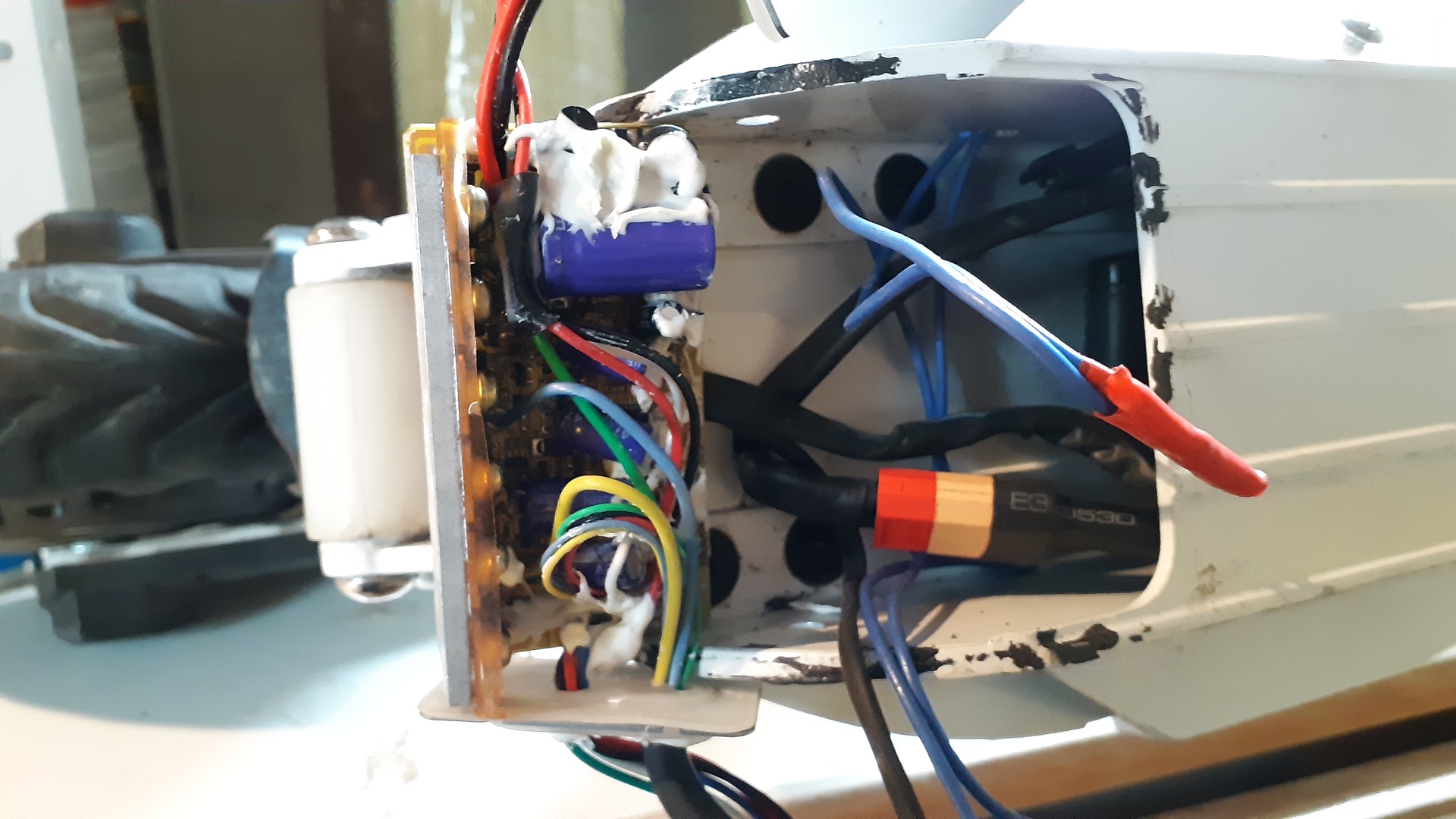
Drähte werden ins Haus gesteckt.
Kondensatoren werden mit einer Klebepistole befestigt.


Der Controller kann an seinem endgültigen Platz montiert werden.
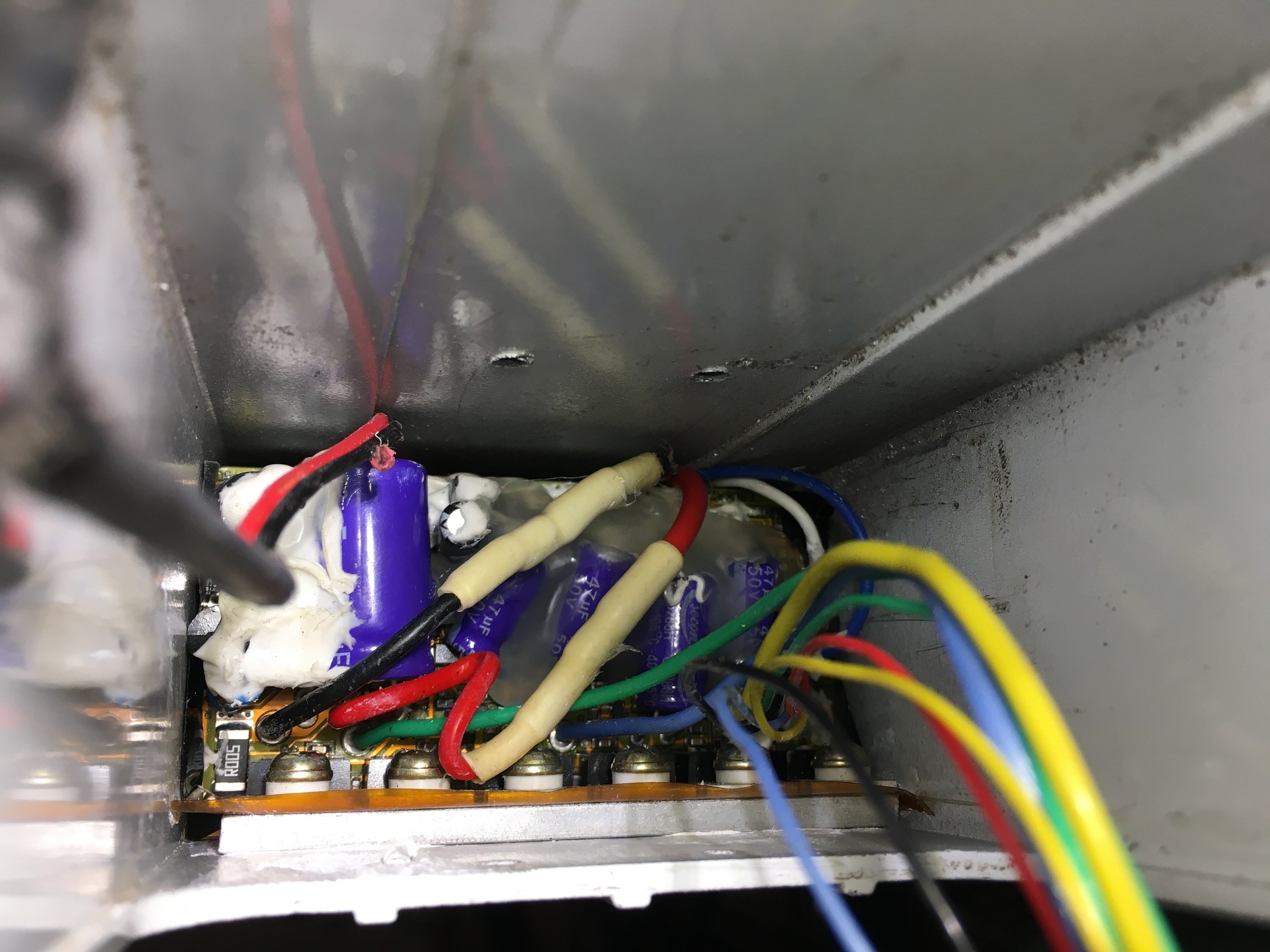

Das endgültige Löten und Isolieren von Drähten.


Hier ist der Motoranschluss.
Es sieht aus wie das.


